
A tisztán elektromos jármű felépítése és kialakítása eltér a hagyományos belső égésű motorral hajtott járművekétől. Ez is egy komplex rendszertervezés. Az optimális szabályozási folyamat eléréséhez integrálnia kell az akkumulátor-technológiát, a motorhajtási technológiát, az autóipari technológiát és a modern vezérléselméletet. Az elektromos jármű tudomány és technológia fejlesztési tervében az ország továbbra is ragaszkodik a „három függőleges és három horizontális” K+F elrendezéshez, és tovább emeli a „három horizontális” közös kulcstechnológiáinak kutatását a technológiai átalakítási stratégia szerint. "tiszta elektromos hajtás", vagyis a hajtómotor és vezérlőrendszerének, az akkumulátornak és annak vezérlőrendszerének, valamint a hajtáslánc-vezérlő rendszernek a kutatása. Minden nagyobb gyártó saját vállalkozásfejlesztési stratégiát alakít ki a nemzeti fejlesztési stratégia szerint.
A szerző egy új energetikai hajtáslánc fejlesztési folyamatának kulcsfontosságú technológiáit válogatja össze, elméleti alapot és referenciát adva a hajtáslánc tervezéséhez, teszteléséhez és gyártásához. A terv három fejezetre tagolódik, hogy elemezze az elektromos hajtás kulcsfontosságú technológiáit a tisztán elektromos járművek hajtásláncában. Ma először bemutatjuk az elektromos hajtástechnológiák elvét és osztályozását.
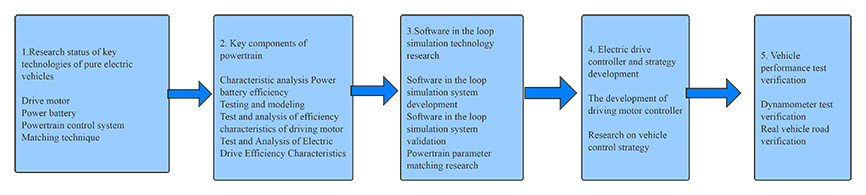
1. ábra Főbb hivatkozások a hajtáslánc-fejlesztésben
Jelenleg a tisztán elektromos járművek hajtásláncának kulcsfontosságú technológiái a következő négy kategóriát foglalják magukban:
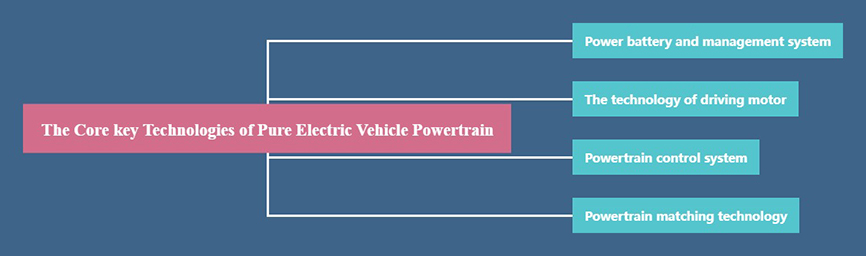
2. ábra A hajtáslánc kulcsfontosságú technológiái
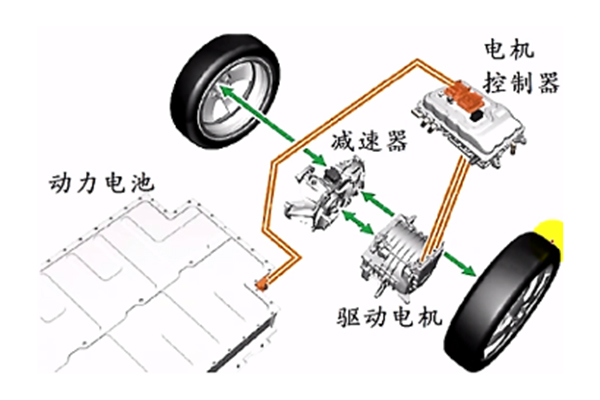
A hajtómotorrendszer definíciója
A jármű akkumulátorának állapotától és a jármű teljesítményigényétől függően a fedélzeti energiatároló áramtermelő berendezés által kibocsátott elektromos energiát mechanikai energiává alakítja, és az energiát a továbbító eszközön és az alkatrészeken keresztül továbbítja a meghajtó kerekekhez. A jármű mechanikai energiája elektromos energiává alakul, és a jármű fékezésekor visszatáplálja az energiatárolóba. Az elektromos hajtásrendszer magában foglalja a motort, a sebességváltó mechanizmust, a motorvezérlőt és más alkatrészeket. Az elektromos hajtásrendszer műszaki paramétereinek tervezése elsősorban a teljesítményt, a nyomatékot, a sebességet, a feszültséget, a redukció átviteli arányát, a tápegység kapacitását, a kimeneti teljesítményt, a feszültséget, az áramot stb.

1) Motorvezérlő
Inverternek is nevezik, az akkumulátor egység által bevitt egyenáramot váltakozó árammá alakítja. Alapkomponensek:
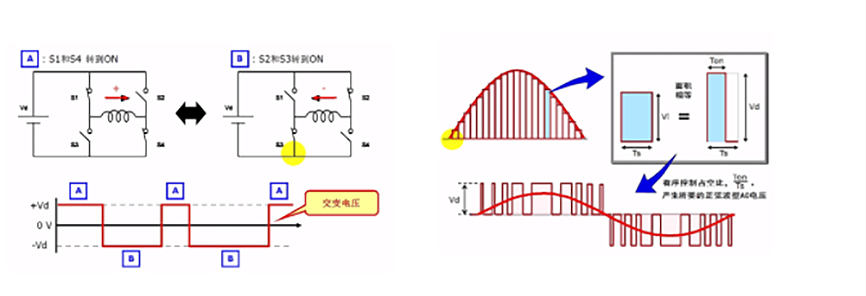
◎ IGBT: erősáramú elektronikus kapcsoló, elv: a vezérlőn keresztül vezérelje az IGBT hídkarját egy bizonyos frekvencia bezárásához és a sorrendkapcsolót a háromfázisú váltóáram előállításához. A teljesítményelektronikus kapcsoló zárásának szabályozásával a váltakozó feszültség átalakítható. Ezután az AC feszültséget a munkaciklus szabályozásával állítják elő.
◎ Filmkapacitás: szűrő funkció; áramérzékelő: háromfázisú tekercs áramának érzékelése.
2) Vezérlő és meghajtó áramkör: számítógépes vezérlőkártya, vezérlő IGBT
A motorvezérlő feladata az egyenáram váltóárammá alakítása, az egyes jelek vétele, valamint a megfelelő teljesítmény és nyomaték kiadása. Alapelemek: teljesítményelektronikai kapcsoló, fóliakondenzátor, áramérzékelő, vezérlőáramkör különböző kapcsolók nyitásához, különböző irányú áramok kialakításához és váltakozó feszültség generálásához. Ezért a szinuszos váltóáramot téglalapokra oszthatjuk. A téglalapok területét azonos magasságú feszültséggé alakítjuk. Az x tengely a hosszszabályozást a munkaciklus vezérlésével valósítja meg, végül megvalósítja a terület egyenértékű átszámítását. Ily módon az egyenáram vezérelhető az IGBT hídkar zárásához egy bizonyos frekvencián, és a vezérlőn keresztül szekvencia kapcsolóval lehet háromfázisú váltakozó áramot generálni.
Jelenleg a meghajtó áramkör kulcselemei importra támaszkodnak: kondenzátorok, IGBT/MOSFET kapcsolócsövek, DSP, elektronikus chipek és integrált áramkörök, amelyek önállóan is gyárthatók, de kapacitásuk gyenge: speciális áramkörök, érzékelők, csatlakozók, önállóan gyártott: tápegységek, diódák, induktorok, többrétegű áramköri lapok, szigetelt vezetékek, radiátorok.
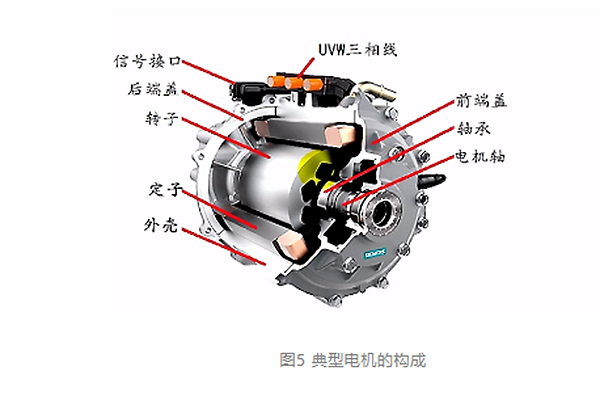
3) Motor: a háromfázisú váltakozó áramot géppé alakítja
◎ Szerkezet: első és hátsó végburkolatok, héjak, tengelyek és csapágyak
◎ Mágneses áramkör: állórész mag, rotormag
◎ Áramkör: állórész tekercs, forgórész vezető
4) Adóeszköz
A sebességváltó vagy a reduktor átalakítja a motor által kiadott nyomatékot az egész járműhöz szükséges fordulatszámra és nyomatékra.
Meghajtó motor típusa
A hajtómotorok a következő négy kategóriába sorolhatók. Jelenleg a váltakozó áramú indukciós motorok és az állandó mágneses szinkronmotorok az új energiájú elektromos járművek leggyakoribb típusai. Tehát az AC indukciós motor és az állandó mágneses szinkronmotor technológiájára összpontosítunk.
| DC motor | AC indukciós motor | Állandó mágneses szinkron motor | Kapcsolt reluktancia motor | |
| Előny | Alacsonyabb költség, alacsony vezérlőrendszer-igény | Alacsony költség, széles lefedettség, fejlett vezérlési technológia, nagy megbízhatóság | Nagy teljesítménysűrűség, nagy hatékonyság, kis méret | Egyszerű felépítés, alacsony követelmények a vezérlőrendszerrel szemben |
| Hátrány | Magas karbantartási igény, alacsony fordulatszám, alacsony nyomaték, rövid élettartam | Kis, hatékony területAlacsony teljesítménysűrűség | Magas költség Gyenge környezeti alkalmazkodóképesség | Nagy forgatónyomaték-ingadozásMagas működési zaj |
| Alkalmazás | Kis vagy mini kis sebességű elektromos jármű | Elektromos üzleti járművek és személygépkocsik | Elektromos üzleti járművek és személygépkocsik | Vegyes hajtású jármű |
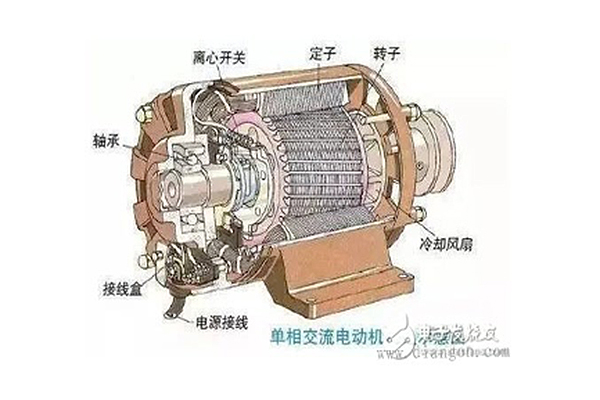 1) AC indukciós aszinkron motor
1) AC indukciós aszinkron motor
Az AC induktív aszinkron motor működési elve az, hogy a tekercs áthalad az állórész résén és a forgórészen: vékony, nagy mágneses vezetőképességű acéllemezekből rakják egymásra. A háromfázisú elektromosság áthalad a tekercsen. Faraday elektromágneses indukciós törvénye szerint forgó mágneses tér jön létre, ami az oka annak, hogy a rotor forog. Az állórész három tekercsét 120 fokos távolságban kapcsolják össze, és körülöttük az áramvezető vezető mágneses teret hoz létre. Ha a háromfázisú tápegységet erre a speciális elrendezésre alkalmazzuk, a mágneses mezők különböző irányokba változnak a váltakozó áram egy adott időpontban történő változásával, egyenletes forgási intenzitású mágneses teret generálva. A mágneses tér forgási sebességét szinkron sebességnek nevezzük. Tegyük fel, hogy Faraday törvénye szerint egy zárt vezetőt helyezünk a belsejébe, mivel a mágneses tér változó. A hurok érzékeli az elektromotoros erőt, ami áramot generál a hurokban. Ez a helyzet olyan, mint a mágneses mezőben lévő áramot szállító hurok, amely elektromágneses erőt generál a hurkon, és Huan Jiang forogni kezd. A mókusketrechez hasonlót használva a háromfázisú váltóáram az állórészen keresztül forgó mágneses teret hoz létre, és az áram indukálódik a véggyűrű által rövidre zárt mókusketrec rúdjában, így a forgórész forogni kezd, ami miért nevezik a motort indukciós motornak. Az elektromágneses indukció segítségével, nem pedig közvetlenül a forgórészhez kapcsolva, hogy elektromosságot indukáljon, szigetelő vasmag-pelyheket töltenek be a rotorba, így a kis méretű vas biztosítja a minimális örvényáram-veszteséget.
2) AC szinkronmotor
A szinkronmotor forgórésze eltér az aszinkron motorokétól. Az állandó mágnes a rotorra van felszerelve, amely felosztható felületre szerelt és beágyazott típusra. A forgórész szilikon acéllemezből készül, az állandó mágnes be van ágyazva. Az állórész 120-as fáziskülönbségű váltakozó árammal is csatlakozik, amely a szinuszos váltóáram méretét és fázisát szabályozza, így az állórész által keltett mágneses tér ellentétes a forgórész által keltett mágneses térrel, és a mágneses mező forog. Ily módon az állórészt mágnes vonzza, és a rotorral együtt forog. A ciklust ciklus után az állórész és a forgórész abszorpciója generálja.
Következtetés: Az elektromos járművek motoros hajtása alapvetően általánossá vált, de nem egységes, hanem szerteágazó. Minden motoros hajtásrendszernek megvan a maga átfogó indexe. Mindegyik rendszert a meglévő elektromos jármű hajtásában alkalmazzák. Legtöbbjük aszinkron motor és állandó mágneses szinkronmotor, míg néhányan reluktanciamotort próbálnak kapcsolni. Érdemes kiemelni, hogy a motorhajtás integrálja a teljesítményelektronikai technológiát, a mikroelektronikai technológiát, a digitális technológiát, az automatikus vezérléstechnikát, az anyagtudományt és más tudományágakat, hogy tükrözze több tudományág átfogó alkalmazási és fejlesztési kilátásait. Erős versenytárs az elektromos járművek motorjaiban. Ahhoz, hogy helyet foglalhassanak a jövő elektromos járműveiben, mindenféle motornak nemcsak a motorszerkezet optimalizálására van szükség, hanem folyamatosan fel kell fedeznie a vezérlőrendszer intelligens és digitális aspektusait is.
Feladás időpontja: 2023. január 30


